摘要:36.在“探究杠杆的平衡条件 实验中.应先调节杠杆两端的平衡螺母.使杠杆在 位置平衡.这样做是为了 . 上图是小明同学三次实验的情景.实验时所用的每个钩码重0.5N.杠杆上每一格长 5cm.部分实验数据已记录在下表中. 实验次数 动力F1/N 动力臂L1/cm 阻力F2/N 阻力臂L2/cm 1 1.5 10 1 2 1 20 10 3 1 20 1.5 10 (1)请将表格中的实验数据补充完整. (2)小明的第3次实验存在错误.其错误是 .
网址:http://m.1010jiajiao.com/timu3_id_1500743[举报]
 30、在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做是为了便于测量
30、在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在水平位置平衡,这样做是为了便于测量力臂
;如发现杠杆左端偏高,则可将的平衡螺母向左
调节.如图所示,要使杠杆在水平位置平衡,你可采用的方法是:右边的钩码向右移动一格
.(写出一种方法即可) 24、在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在
24、在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在水平
位置平衡,这样做是为了便于测量力臂
.如发现杠杆左端偏高,则可将右端的平衡螺母向左
调节,此后在整个实验过程中,能否再旋动两端的平衡螺母?
不能
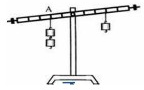
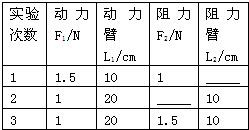
.如图是小明同学三次实验的情景,实验时所用的每个钩码重均为0.5N,杠杆上刻线的间距为5cm,部分实验数据记录如下表:

(1)请将表格中的实验数据补充完整.
(2)小明的第3次实验记录中有一个数据明显错误,它是
动力臂L1=20cm
,错误原因是
误认为杠杆上的4格为动力臂
.(3)某次测量中,在如图所示的条件下杠杆已处于平衡状态.若小明同时拿走两边下方的两个钩码,则杠杆的
左
(“左”或“右”)端将下沉.为使杠杆恢复水平平衡,小明应将左侧剩余的两个钩码移至D
点处.
26、在“探究杠杆的平衡条件”实验中,应先调节杠杆两端的平衡螺母,使杠杆在

(1)请将表格中的实验数据补充完整.
(2)小明的第3次实验存在错误,其错误是
(3)在探究杠杆平衡条件的实验中,多次改变力和力臂的大小主要是为了
A.减小摩擦,B.使每组数据更准确
C.多次测量取平均值减小误差,D.获取多组实验数据归纳出物理规律
(4)古希腊的学者阿基米德首先总结了杠杆平衡条件,据此,他发出了“给我一个支点,我就能撬起整个地球”的豪言,他的设想
查看习题详情和答案>>
水平
位置平衡;如发现杠杆左端偏高,则可将平衡螺母向左
调节.如图是小明同学三次实验的情景,实验时所用的每个钩码重0.5N,杠杆上每一格长5cm,部分实验数据已记录在上表中.(1)请将表格中的实验数据补充完整.
(2)小明的第3次实验存在错误,其错误是
F1的方向未垂直于杠杆
.(3)在探究杠杆平衡条件的实验中,多次改变力和力臂的大小主要是为了
D
A.减小摩擦,B.使每组数据更准确
C.多次测量取平均值减小误差,D.获取多组实验数据归纳出物理规律
(4)古希腊的学者阿基米德首先总结了杠杆平衡条件,据此,他发出了“给我一个支点,我就能撬起整个地球”的豪言,他的设想
有
(“有”或“没有”)道理,经过努力能实现吗?为什么?不能,没有这么长的杠杆
.