题目内容
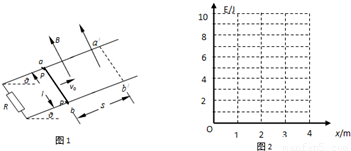
如图1所示,平行金属导轨宽度为l=0.6m,与水平面间的倾角为θ=37°,导轨电阻不计,底端接有阻值为R=3Ω的定值电阻,磁感强度为B=1T的匀强磁场垂直穿过导轨平面.有一质量为m=0.2kg,长也为l的导体棒受导轨上两支柱p支撑静止在ab位置,导体棒的电阻为Ro=1Ω,它与导轨之间的动摩擦因数为μ=0.3.导体棒获得平行斜面的初速vo=10m/s向上滑行最远至a′b′位置,所滑行距离为s=4m.(sin37°=0.6,cos37°=0.8,重力加速度g=10m/s2).问:(1)把运动导体棒视为电源,最大输出功率是多少?
(2)上滑过程中导体棒所受的安培力做了多少功?
(3)以ab位置为零势点,若导体棒从ab上滑d=3m过程中电阻R发出的热量QR=2.1J,此时导体棒的机械能E′为多大?
(4)在图2中画出图线,要求能反映导体棒在上滑和下滑过程中机械能E随位移x变化的大致规律.(x正方向沿斜面向上,坐标原点O在ab位置)
【答案】分析:(1)导体棒向上滑行时做减速运动,刚开始运动时切割速度,导体棒产生的感应电动势和感应电流最大,输出功率也最大,由I 、E=Blv、P=I2R求出最大的输出功率.
、E=Blv、P=I2R求出最大的输出功率.
(2)上滑过程中,重力、安培力和滑动摩擦力对导体棒做功,根据动能定理求解安培力做功.
(3)电阻R与导体棒串联,由焦耳定律得到R上产生的热量,即可求得电路总的发热量.由功能原理求解E′.
(4)棒至a′b′位置时机械能为Eab=mgssinθ,棒回到ab位置时速度不可能为零,这时的机械能0<E末<(4.8-1.92=2.88)J,再画出机械能E随位移x变化的大致规律.
解答:解:(1)由闭合电路欧姆定律Im= =
= =1.5A
=1.5A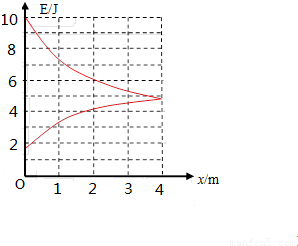
最大输出功率为Pm= R═6.75W
R═6.75W
(2)安培力做负功,由动能定理
-W安-mgs(sinθ+μcosθ)=0-
代入数据得W安=3.28J
(3)R:R=3;1,由串联电路功率关系得焦耳热Q总:QR=4:3
解得,Q总=2.8J
根据功能原理:Q总+W克= ,
,
代入数据解得E′=5.76J
(4)棒至a′b′位置时机械能为Eab=mgssinθ=0.2×10×4×0.6J=4.8J,由能量关系分析,棒回到ab位置时速度不可能为零,这时的机械能
0<E末<(4.8-1.92=2.88)J,画出的大致图线如右图所示.
答:
(1)把运动导体棒视为电源,最大输出功率是6.75W.
(2)上滑过程中导体棒所受的安培力做了3.28J的功.
(3)导体棒的机械能E′为5.76J.
(4)在图2中画出反映导体棒在上滑和下滑过程中机械能E随位移x变化的大致规律的图线如图.
点评:本题的解题关键是把握能量是如何转化的,根据能量守恒定律研究电磁感应问题.
、E=Blv、P=I2R求出最大的输出功率.(2)上滑过程中,重力、安培力和滑动摩擦力对导体棒做功,根据动能定理求解安培力做功.
(3)电阻R与导体棒串联,由焦耳定律得到R上产生的热量,即可求得电路总的发热量.由功能原理求解E′.
(4)棒至a′b′位置时机械能为Eab=mgssinθ,棒回到ab位置时速度不可能为零,这时的机械能0<E末<(4.8-1.92=2.88)J,再画出机械能E随位移x变化的大致规律.
解答:解:(1)由闭合电路欧姆定律Im=
==1.5A最大输出功率为Pm=
R═6.75W(2)安培力做负功,由动能定理
-W安-mgs(sinθ+μcosθ)=0-
代入数据得W安=3.28J
(3)R:R=3;1,由串联电路功率关系得焦耳热Q总:QR=4:3
解得,Q总=2.8J
根据功能原理:Q总+W克=
,代入数据解得E′=5.76J
(4)棒至a′b′位置时机械能为Eab=mgssinθ=0.2×10×4×0.6J=4.8J,由能量关系分析,棒回到ab位置时速度不可能为零,这时的机械能
0<E末<(4.8-1.92=2.88)J,画出的大致图线如右图所示.
答:
(1)把运动导体棒视为电源,最大输出功率是6.75W.
(2)上滑过程中导体棒所受的安培力做了3.28J的功.
(3)导体棒的机械能E′为5.76J.
(4)在图2中画出反映导体棒在上滑和下滑过程中机械能E随位移x变化的大致规律的图线如图.
点评:本题的解题关键是把握能量是如何转化的,根据能量守恒定律研究电磁感应问题.

练习册系列答案
相关题目